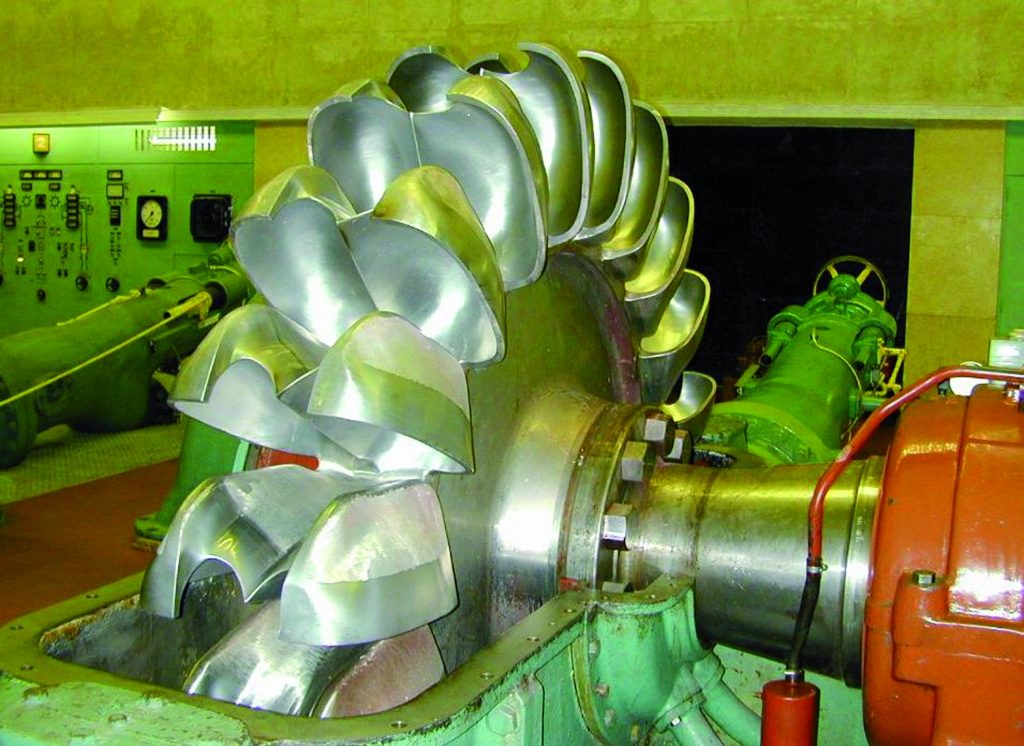
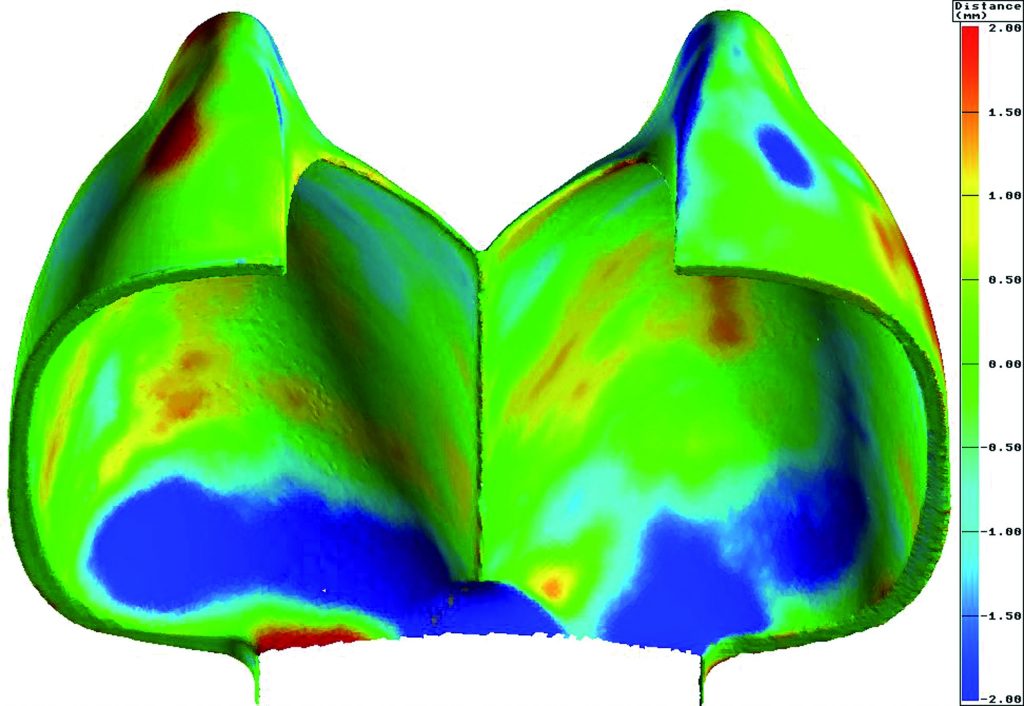
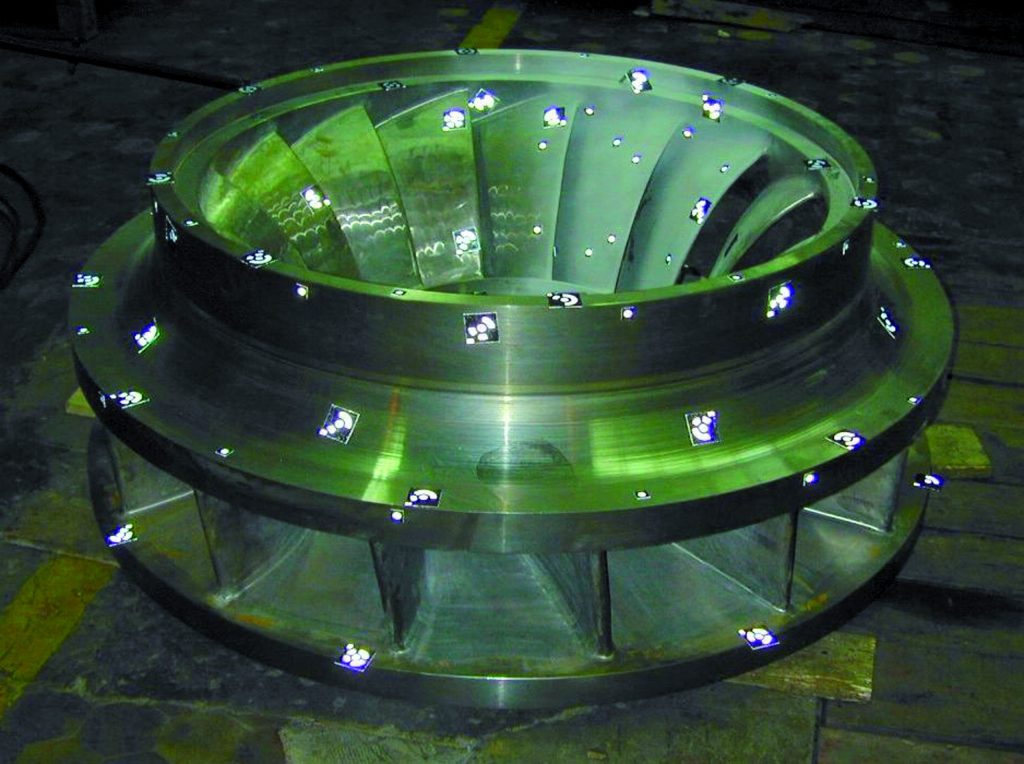
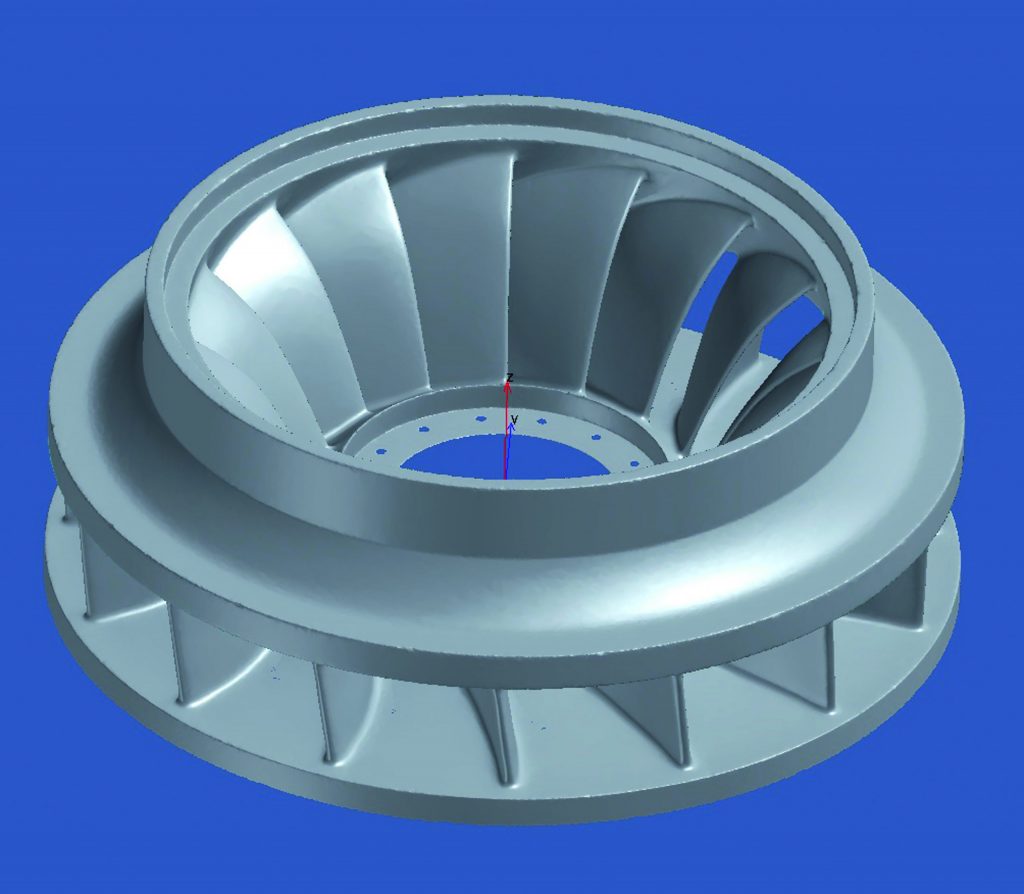
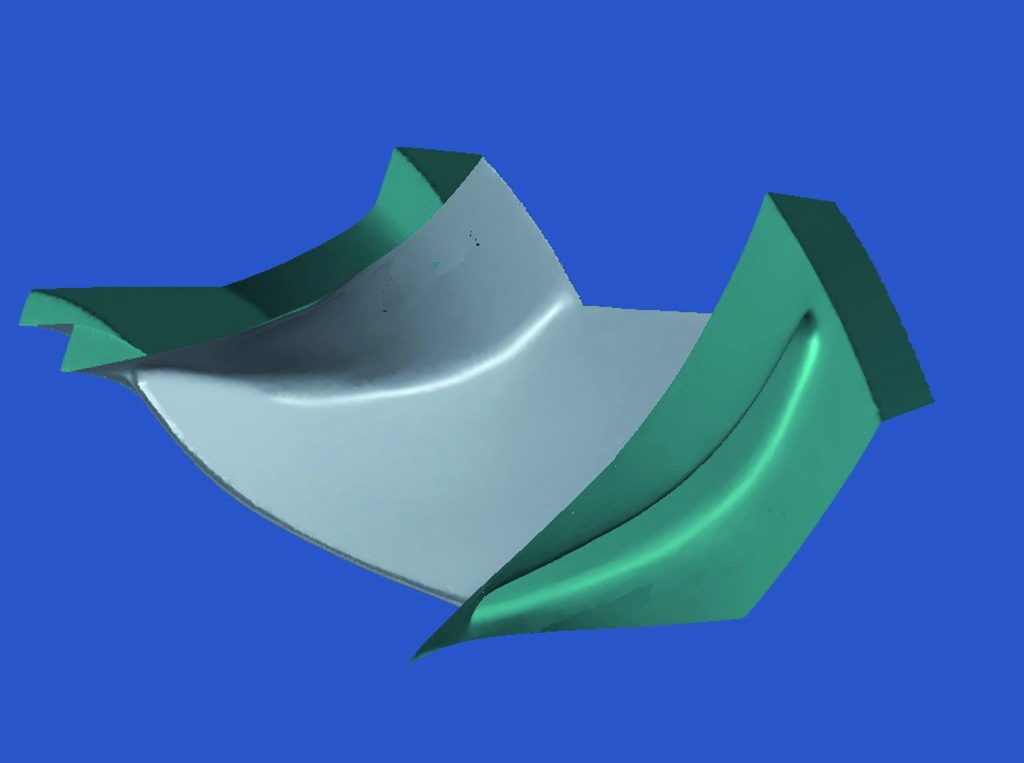
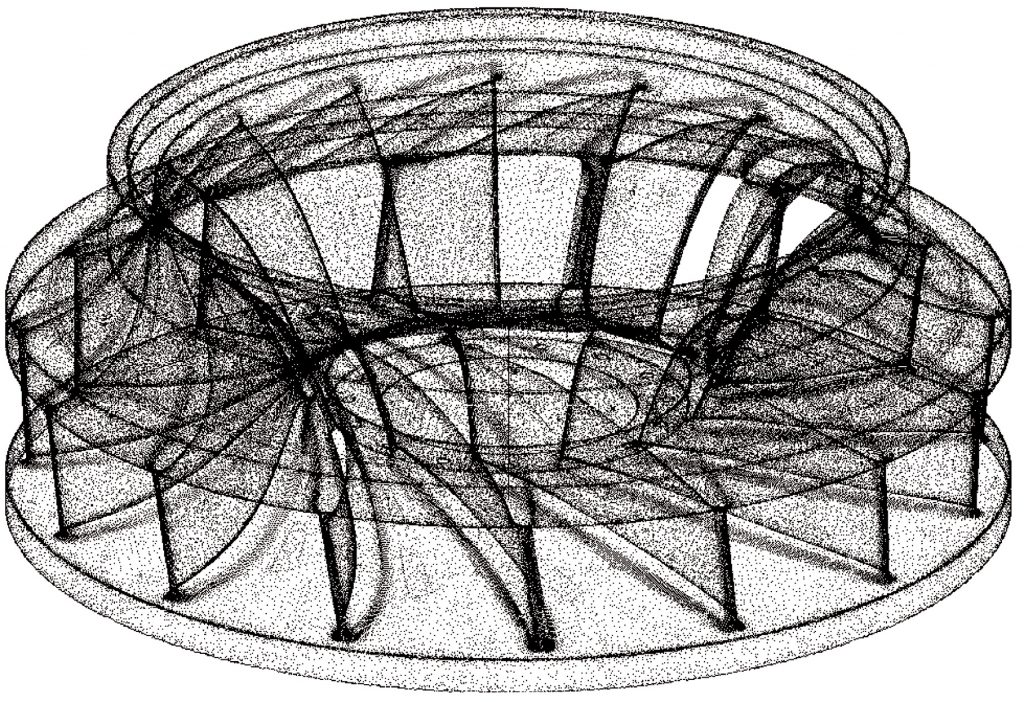
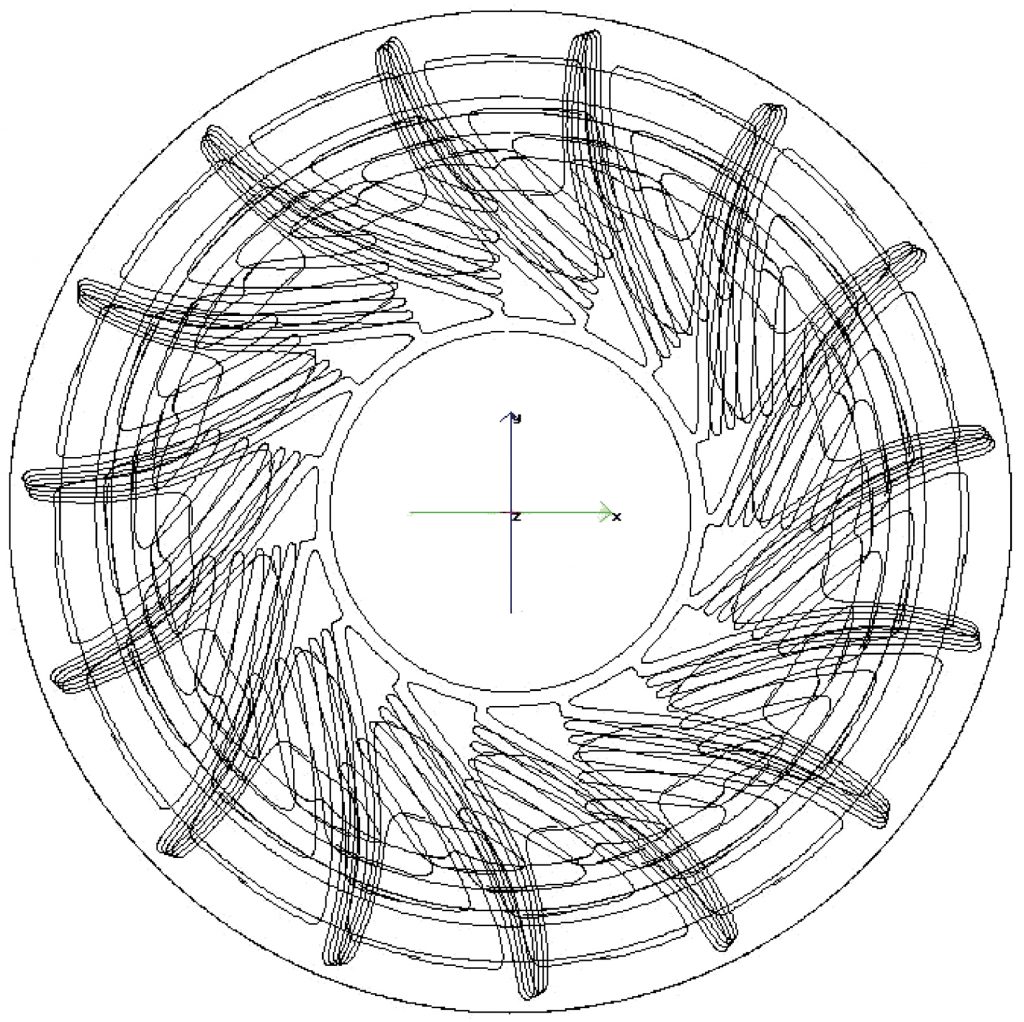
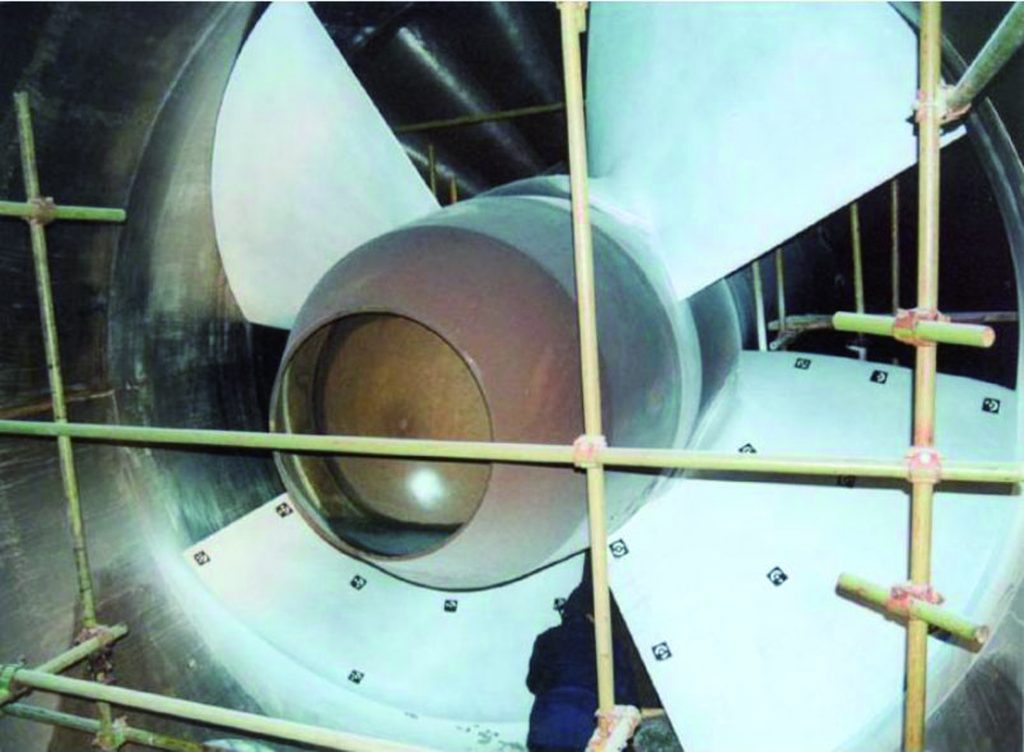
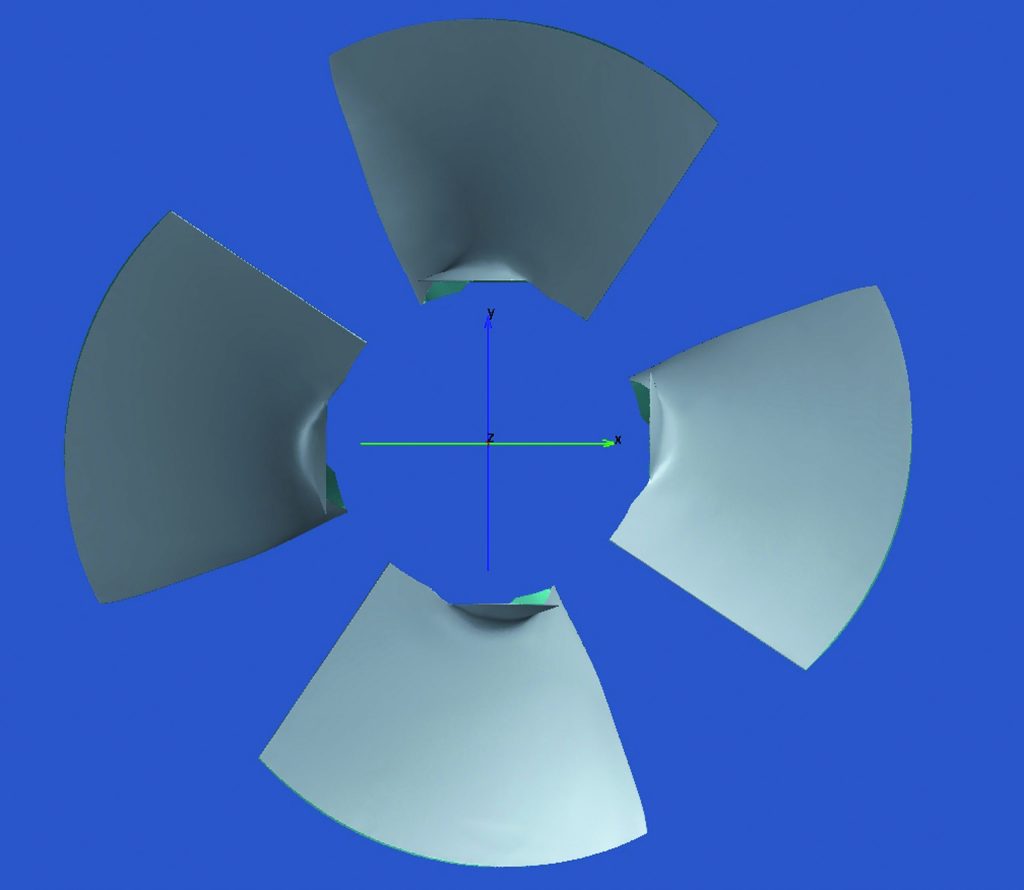
我们的合作伙伴TOPOMATIKA与Croatian Institute of Civil Engineering和Croatian Electric Power Industry成功开展了合作。团队经过不懈努力,利用三维光学扫描系统构建了水电站多台水轮机的数字化模型,以数字化形式展现各种“竣工”后的三维效果。“竣工”效果数据集用于创建“竣工与设计”效果检查报告, 以帮助评估水轮机的运行状况和效率。此外,他们还将三维扫描数据用于构建重复的组件,并设置基线以生成新的设计。非接触式三维光学数字化系统有助于对简单和复杂物体进行精确而详细的扫描。在结合TRITOP数字摄影测量系统的情况下,可快速准确地扫描各种物体,从喷气式推进系统到地基发电涡轮机,再到全尺寸飞机等,均轻松应对。这套测量系统采用便携式设计,易于运输,可现场进行三维扫描(在发电站、车间等场所)。借助这套便携式三维扫描系统,无需再将要扫描的物体带到测量实验室。